Aplicaciones de Robots Industriales Utilizados a Nivel Mundial
En la actualidad los robots se usan de manera extensa en la industria, siendo un elemento indispensable en una gran parte de los procesos de manufactura. Impulsados principalmente por el sector del automóvil, los robots han dejado de ser máquinas misteriosas propias de la ciencia-ficción para ser un elemento mas de muchos de los talleres y líneas de producción.
Por su propia definición el robot industrial es multifuncional, esto es, puede ser aplicado a un número, en principio ilimitado, de funciones. No obstante, la práctica ha demostrado que su adaptación es óptima en determinados procesos (soldadura, paletización, etc.) en los que hoy día el robot es sin duda alguna, la solución más rentable.
Junto con estas aplicaciones, ya arraigadas, hay otras novedosas en las que si bien la utilización del robot no se realiza a gran escala, si se justifica su aplicación por las condiciones intrínsecas del medio de trabajo (ambientes contaminados, salas asépticas, construcción, etc.) o la elevada exigencia en cuanto a calidad de los resultados (medicina, etc.). Estos robots se han venido llamando robots de servicio.
A continuación se analizan algunas de las aplicaciones industriales de los robots, ofreciendo una breve descripción del proceso, exponiendo el modo en el que el robot entra a formar parte del mismo, y considerando las ventajas e inconvenientes.
Trabajos en Fundición
La fundición por inyección fue el primer proceso robotizado (1960). En este proceso el material usado, en estado líquido, es inyectado a presión en el molde. Este último está formado por dos mitades que se mantienen unidas durante la inyección del metal mediante la presión ejercida por dos cilindros. La pieza solidificada se extrae del molde y se enfría para su posterior desbardado. El molde, una vez limpio de residuos de restos de metal y adecuadamente lubricado, puede ser usado de nuevo.
El robot se usa en:
- la fundición de las piezas del molde y transporte de éstas a un lugar de enfriado y posteriormente a otro proceso (desbardado, corte, etc.).
- la limpieza y mantenimiento de los moldes, eliminando rebabas (por aplicación de aire comprimido) y aplicando el lubricante.
- la colocación de piezas en el interior de los moldes (embutidos).

Soldadura
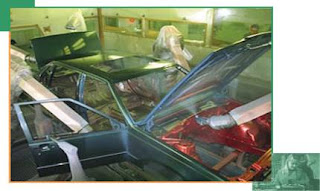
La industria automovilística ha sido la gran impulsora de la robótica industrial, empleando la mayor parte de los robots instalados hoy día. La tarea robotizada más frecuente dentro de la fabricación de automóviles ha sido, sin duda alguna, la soldadura de carrocerías. En este proceso, dos piezas metálicas se unen en un punto para la fusión conjunta de ambas partes, denominándose a este tipo de soldadura por puntos.
Para ello, se hace pasar una corriente eléctrica elevada y a baja tensión a través de dos electrodos enfrentados entre los que se sitúan las piezas a unir. Los electrodos instalados en una pinza de soldadora, deben sujetar las piezas con una presión determinada (de lo que depende la precisión de la soldadura). Además deben ser controlados los niveles de tensión e intensidad necesarios, así como el tiempo de aplicación. Todo ello exige el empleo de un sistema de control del proceso de soldadura.

Para ello, se hace pasar una corriente eléctrica elevada y a baja tensión a través de dos electrodos enfrentados entre los que se sitúan las piezas a unir. Los electrodos instalados en una pinza de soldadora, deben sujetar las piezas con una presión determinada (de lo que depende la precisión de la soldadura). Además deben ser controlados los niveles de tensión e intensidad necesarios, así como el tiempo de aplicación. Todo ello exige el empleo de un sistema de control del proceso de soldadura.
Aplicación de Materiales
El acabado de superficies por recubrimiento de un cierto material (pintura, esmalte, partículas de metal, etc.) con fines decorativos o de protección, es una parte crítica en muchos procesos de fabricación.
Tanto en la pintura como en el metalizado, esmaltado o arenado, la problemática a resolver es similar, siendo la primera la que cuenta con mayor difusión. Su empleo esta generalizado en la fabricación de automóviles, electrodomésticos, muebles, etc.
Tanto en la pintura como en el metalizado, esmaltado o arenado, la problemática a resolver es similar, siendo la primera la que cuenta con mayor difusión. Su empleo esta generalizado en la fabricación de automóviles, electrodomésticos, muebles, etc.

Aplicación de adhesivos y sellantes
Los robots son frecuentemente utilizados para la aplicación de cordones de material sellante o adhesivos en la industria del automóvil sellante de ventanas y parabrisas, material anticorrosivo en los bajos del coche, etc.).
En este proceso el material a aplicar se encuentra en forma líquida o pastosa en un tanque, siendo bombeada hasta la pistola de aplicación que porta el robot, que regula el caudal de material que es proyectado.
En este proceso el material a aplicar se encuentra en forma líquida o pastosa en un tanque, siendo bombeada hasta la pistola de aplicación que porta el robot, que regula el caudal de material que es proyectado.
El robot, siguiendo la trayectoria programada, proyecta la sustancia que se solidifica al contacto con el aire. En este proceso, tan importante como el control preciso de la trayectoria del robot es el control sincronizado de su velocidad y del caudal de material suministrado por la pistola, puesto que la cantidad de material proyectado en un punto de la pieza depende de ambos factores.
Es habitual una disposición del robot suspendido sobre la pieza, siendo necesario, por los motivos antes expuestos, que el robot tenga capacidad de control de trayectoria continua (posición y velocidad regulados con precisión), así como capacidad de integrar en su propia unidad de control la regulación del caudal de material aportado en concordancia con la velocidad del movimiento.
Corte
El corte de materiales mediante el robot es una aplicación reciente que cuenta con notable interés. La capacidad de reprogramación del robot y su integración en un sistema, hacen que aquél sea el elemento ideal para transportar la herramienta de corte sobre la pieza, realizando con precisión un programa de corte definido previamente desde un sistema de diseño asistido por computador (CAD).
Los métodos de corte no mecánico más empleados son oxicorte, plasma, láser y chorro de agua, dependiendo de la naturaleza del material a cortar. En todos ellos el robot transporta la boquilla por la que se emite el material de corte, proyectando éste sobre la pieza al tiempo que sigue una trayectoria determinada.
Las piezas a cortar pueden disponerse en varias capas, unas encima de otras, realizándose el corte simultáneo de todas ellas (método de corte de patrones en la industria textil).

Montaje
Las operaciones de montaje, por la gran precisión y habilidad que normalmente exigen, presentan grandes dificultades para su automatización flexible. Sin embargo, el hecho de que estas operaciones representen una buena parte de los costes totales del producto, ha propiciado las investigaciones y desarrollos en esta área, consiguiéndose importantes avances.
Muchos procesos de ensamblado se han automatizado empleando máquinas especiales que funcionan con gran precisión y rapidez. Sin embargo, el mercado actual precisa de sistemas muy flexibles, que permitan introducir frecuentes modificaciones en los productos con unos costes mínimos. Por este motivo el robot industrial se ha convertido en muchos casos en la solución ideal para la automatización del ensamblaje.
Muchos procesos de ensamblado se han automatizado empleando máquinas especiales que funcionan con gran precisión y rapidez. Sin embargo, el mercado actual precisa de sistemas muy flexibles, que permitan introducir frecuentes modificaciones en los productos con unos costes mínimos. Por este motivo el robot industrial se ha convertido en muchos casos en la solución ideal para la automatización del ensamblaje.

Control de calidad
La tendencia a conseguir una completa automatización de la producción abarca todas las etapas de ésta, inclusive el control de la calidad. El robot industrial puede participar en esta tarea usando su capacidad de posicionamiento y manipulación. Así, transportando en su extremo un palpador, puede realizar el control dimensional de piezas ya fabricadas. Para ello el robot toca con el palpador varios puntos claves de la pieza.
A partir del conocimiento que en todo instante tiene la unidad de control del robot de la posición y orientación de su extremo, se obtienen los datos relativos a la posición espacial de los puntos determinados de la pieza. Estos datos son utilizados para registrar posibles desviaciones sobre los valores deseados.
Otras posibles aplicaciones del robot en el control de calidad consisten en utilizar a éste para transportar el instrumental de medida (ultrasonidos, rayos X, etc.) a puntos concretos de la pieza a examinar. La situación de posibles defectos detectados puede registrarse y almacenarse a partir, como antes, de la propia unidad de control de robot.
Por ultimo, el robot puede usarse como mero manipulador encargado de clasificar piezas según ciertos criterios de calidad (piezas correctas e incorrectas, por ejemplo). En este caso, el control y decisión de a que familia pertenece la pieza se hace mediante un sistema especifico, capaz de comunicarse con el robot (visión artificial). No existe, en este caso, un tipo concreto de robot más adecuado para estas tareas. En el control dimensional suelen usarse robots cartesianos por la precisión de estos pero, en general, son igualmente validos robots articulares.
Autor del Post Hector Lugo
Otras posibles aplicaciones del robot en el control de calidad consisten en utilizar a éste para transportar el instrumental de medida (ultrasonidos, rayos X, etc.) a puntos concretos de la pieza a examinar. La situación de posibles defectos detectados puede registrarse y almacenarse a partir, como antes, de la propia unidad de control de robot.
Por ultimo, el robot puede usarse como mero manipulador encargado de clasificar piezas según ciertos criterios de calidad (piezas correctas e incorrectas, por ejemplo). En este caso, el control y decisión de a que familia pertenece la pieza se hace mediante un sistema especifico, capaz de comunicarse con el robot (visión artificial). No existe, en este caso, un tipo concreto de robot más adecuado para estas tareas. En el control dimensional suelen usarse robots cartesianos por la precisión de estos pero, en general, son igualmente validos robots articulares.
Autor del Post Hector Lugo
Comentarios
Publicar un comentario