Relación de la robótica con la visión computacional y con el procesamiento del lenguaje
El término robótica se refiere al
área que engloba la construcción de dispositivos autónomos que actúan en el
mundo real de forma que mimeticen el comportamiento de los seres humanos. Esto
quiere decir que estos robots podrán sentir el ambiente usando sus sensores y que puedan
modificar o moverse en el
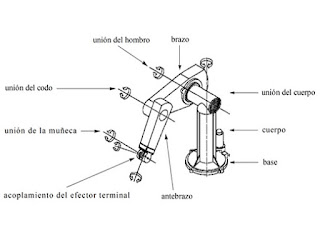
ambiente usando sus actuadores. De esta forma, es posible definir un robot como
un dispositivo mecánico versátil equipado con sensores y actuadores, controlado
por un sistema computacional capaz de extraer informaciones del ambiente y usar
su conocimiento al respecto del mundo de forma a actuar sobre el mismo a través
de movimientos.
Robótica engloba tres áreas:
- Mecánica.
- Electrónica.
- Computación.
En el caso específico de la computación podemos citar varias
subáreas las cuales hacen parte del dominio de la robótica. Por ejemplo la inteligencia
artificial, redes de computadoras, procesamiento digital de imágenes,
compiladores, estructuras de datos, sistemas operativos, entre otras. Un robot
necesita procesar información del mundo real, es decir, debe existir un
procesador capaz de tomar decisiones respecto a la medición de variables
físicas, por lo tanto, existe una convergencia entre la robótica y las ciencias
computacionales.

Hablando de la inteligencia artificial primero podemos hablar de la
teoría de agentes, que es aplicable directamente en robótica, inclusive es
importante notar que algunos autores incluyen a los robots como un tipo de
agente, llamándolos de agentes robots. Ya al hablar de algoritmos de
aprendizaje (supervisado, no supervisado y por refuerzo) también se aplican a
robótica especialmente cuando se desea construir robots autónomos que hagan una
conexión “inteligente” entre lo que sienten y sus acciones.

Visión artificial, también conocida como visión por computador (del
ingles computer vision) o visión técnica, es un subcampo de la inteligencia artificial.
El propósito de la visión artificial es programar una computadora para que
"entienda" una escena o las características de una imagen. Los
objetivos típicos de la visión artificial incluyen: La detección, segmentación,
localización y reconocimiento de ciertos objetos en imágenes (por ejemplo,
caras humanas). La evaluación de los resultados (por ejemplo, segmentación,
registro). Registro de diferentes imágenes de una misma escena u objeto, es
decir, hacer concordar un mismo objeto en diversas imágenes. Seguimiento de un
objeto en una secuencia de imágenes. Mapeo de una escena para generar un modelo
tridimensional de la escena; este modelo podría ser usado por un robot para
navegar por la escena. Estimación de las posturas tridimensionales de humanos.
Búsqueda de imágenes digitales por su contenido. Estos objetivos se consiguen
por medio de reconocimiento de patrones, aprendizaje estadístico, geometría de
proyección, procesamiento de imágenes, teoría de grafos y otros campos. La
visión artificial cognitiva está muy relacionada con la psicología cognitiva y
la computación biológica.

También, las redes neuronales con
aprendizaje supervisado son muy usadas para controlar robots y sus partes. Por
ejemplo se pueden usar redes neuronales para controlar las piernas de un robot
bípedo. Al mismo tiempo, la aplicación de estas técnicas representa un gran
desafío para los investigadores en esta área pues las mismas funcionan
correctamente en condiciones normales donde se puede disponer de un tiempo “muy
grande” para Su convergencia, sin embargo, al aplicarlos en robótica nos
encontramos con que la respuesta de los robots debe ser en tiempo real lo que
agrega una restricción mas y hace mucho mas interesante esta área de
investigación.


Comentarios
Publicar un comentario